近日,機(jī)械優(yōu)集學(xué)院研究生黃寅杰在智能交通領(lǐng)域頂級期刊IEEE Transactions on Intelligent Transportation Systems(中科院1區(qū),JCR Q1區(qū),,TOP期刊,,影響因子8.5)上發(fā)表了題為D-TLDetector: Advancing Traffic Light Detection With a Lightweight Deep Learning Model的研究論文,。研究生黃寅杰為第一作者,導(dǎo)師王福元教授為通訊作者,,鹽城工學(xué)院為第一單位,。
該論文針對復(fù)雜天氣條件下的交通燈識別課題開展研究,提出了一種輕量級交通信號燈檢測模型,,該模型采用輕量化骨干網(wǎng)絡(luò)和Low-GD neck 構(gòu)架,。在骨干網(wǎng)絡(luò)設(shè)計(jì)中,采用了結(jié)構(gòu)性重參數(shù)化和輕量化視覺變換器(VITs)來增強(qiáng)模型,,通過多分支和Feed-Forward Network(FFN)結(jié)構(gòu)來分別增強(qiáng)信息豐富性和模型的位置感知能力,。
在模型的骨干部分,基于EfficientV2結(jié)構(gòu)重新設(shè)計(jì)了一種新型的LightWeight Block:在Neck 部分,,采用了Low-stage gather-and-distribute branch(LSGD)以取代傳統(tǒng)的特征金字塔網(wǎng)絡(luò)FPN,。在交通信號燈數(shù)據(jù)集上提出了一種基于Stable Diffusion 的數(shù)據(jù)擴(kuò)充方法,結(jié)構(gòu)如圖1所示,。
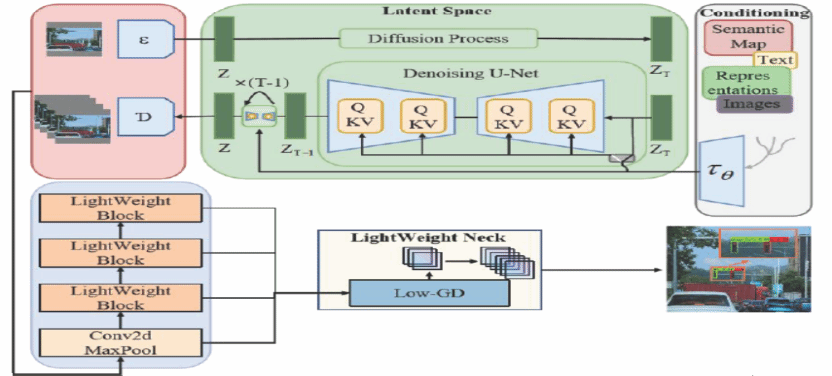
Figure 1. The flowchart of algorithm
在傳統(tǒng)backbone 網(wǎng)絡(luò)的設(shè)計(jì)中,,常常忽略了下采樣過程中輸入數(shù)據(jù)發(fā)生的顯著信息損失,。因此,,交通信號燈等小目標(biāo)物體的重要特征信息很容易在傳遞到輸出末端時(shí)消失。另外,,鑒于移動(dòng)設(shè)備平臺(tái)的計(jì)算能力有限,,需要更輕量級的特征提取模型。在EfficientNetV2 的啟發(fā)下,,結(jié)合輕量化VITs 架構(gòu)和structural reparameterization,,構(gòu)建了一種輕量級特征提取網(wǎng)絡(luò)。如圖2所示,。
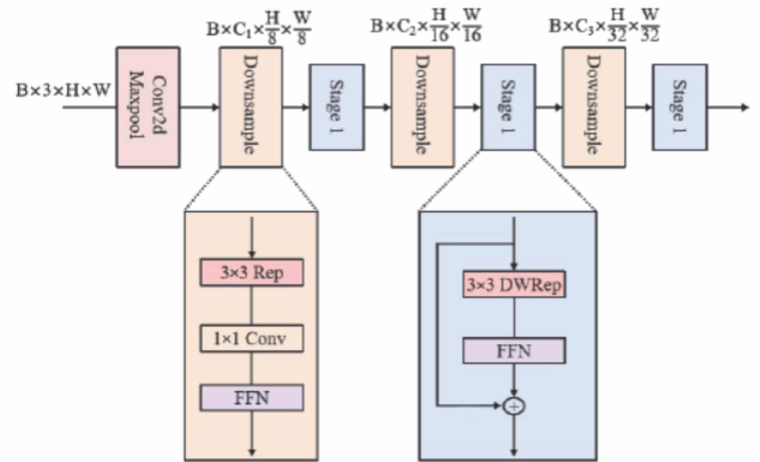
Figure 2. The overview of lightweight backbone architecture
圖11展示了五種不同輕量化模塊的Grad-CAM 圖進(jìn)行比較,。在這次比較中,Grad-CAM圖是基于BackBone 最后一層的輸出特征生成的,。圖片中紅色區(qū)域越深表示網(wǎng)絡(luò)對該部分特征的關(guān)注度越高,,這些區(qū)域?qū)δP偷奈矬w識別影響較大。通過觀察和對比這些Grad-CAM 圖,,意到不同輕量化網(wǎng)絡(luò)架構(gòu)下熱力圖的特征分布和關(guān)注區(qū)域各異,。
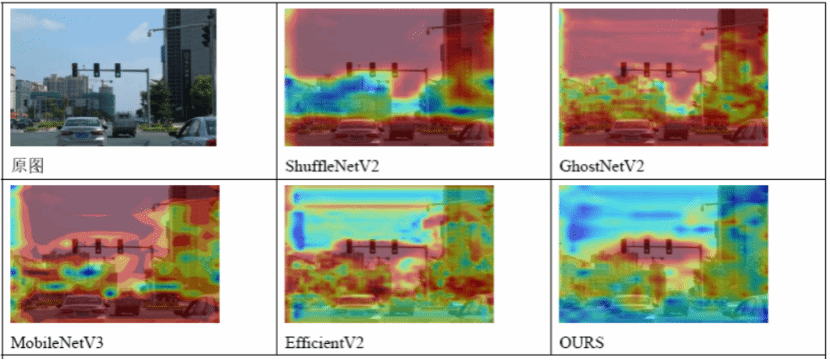
Figure 11 Grad-CAM images with various lightweight backbone networks
圖14所示為mAP和FPS在各種場景中的關(guān)系。 圖片中越接近左上角,,模型總體的性能就越好,。由此可見,在輸入尺寸為640 情況下輕量化模型的檢測速度比常規(guī)模型快,但是檢測精度相對較低,。提出的D-TLDetector 模型與輕量化型號和常規(guī)型號相比,,表現(xiàn)出明顯的優(yōu)勢,可以有效地平衡檢測速度(135FPS)和檢測精度(98.23%),。
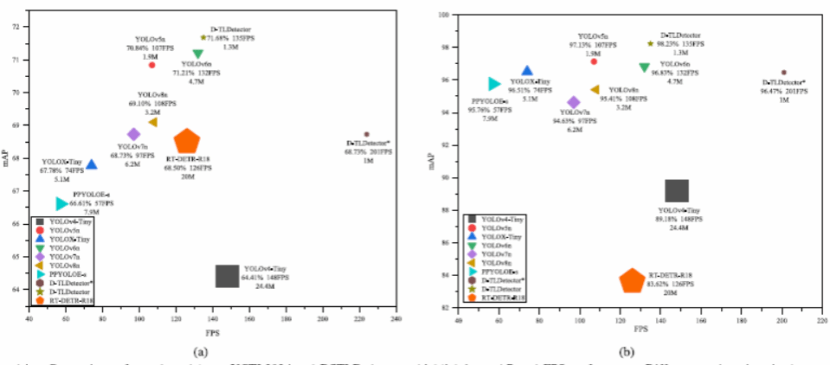
Fig. 14. Comparison of tested models on YCTL2024 and BSTLD datasets, highlighting mAP and FPS performance
D-TLDetector 克服了傳統(tǒng)檢測模型在信息交換和數(shù)據(jù)增強(qiáng)方面的局限,,同時(shí)有效解決了在復(fù)雜天氣條件下的數(shù)據(jù)不足問題。實(shí)驗(yàn)結(jié)果表明,,模型在BSTLD 和YCYL2024 數(shù)據(jù)集上實(shí)現(xiàn)了優(yōu)異的性能,,特別是在復(fù)雜交通場景中展示了顯著的檢測能力和魯棒性。此外,,D-TLDetector 的輕量化設(shè)計(jì)使其適于在資源受限的邊緣計(jì)算設(shè)備上部署,,從而有望在智能交通系統(tǒng)等實(shí)際應(yīng)用中發(fā)揮重要作用。
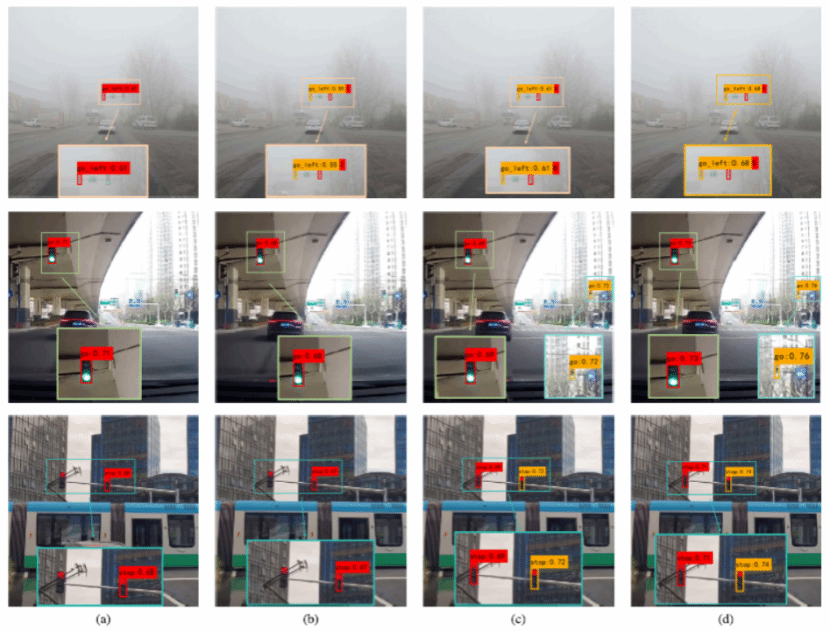
Fig. 15. Detection result images for different models
(a) Yolov5n; (b) Yolov7-Tiny; (c) Yolov8n; (d) D-TLDetector
論文鏈接網(wǎng)址:https://ieeexplore.ieee.org/document/10834444
 首頁動(dòng)態(tài)
首頁動(dòng)態(tài)
